机器人 & 仓储自动化
2025-05-20
人形机器人核心硬件的发展现状和趋势

Marco Wang
Marco负责支持Interact Analysis在商用车领域的研究。在加入Interact Analysis之前,他在德国完成研究生课程后在一家投资银行工作,主要负责汽车行业跨境并购项目的行业研究。他在氢动力汽车市场拥有丰富的研究经验。
让人形机器人实现复杂环境感知与灵活动作的关键在于一系列精密的核心硬件。这些硬件构成了机器人的“感官”与“肢体”。这些硬件作为人形机器人的物理载体,其性能的发展决定了人形机器人的功能边界,而人形机器人在未来的规模化起量则有望撬动巨大的零部件市场。
人形机器人的“感知”与“运动”基石——核心硬件概览
感知层面,人形机器人依赖多种传感器协同工作,以构建对周围环境的全面认知。深度相机与激光雷达(LiDAR)是主要的视觉感知单元,前者提供三维环境信息,后者则擅长远距离、高精度的测距与建模,两者融合能够帮助机器人在复杂动态环境中精准定位与导航。惯性测量单元(IMU)则赋予机器人感知自身姿态与运动状态的能力,对于维持平衡与协调运动至关重要。此外,触觉传感器近年来愈发受到重视,分布于机器人手部、足部乃至躯干,使其能够感知接触力、压力、纹理等信息,对于实现精细操作与安全交互不可或缺。
运动层面,人形机器人的灵活性与力量输出则依赖于高性能的执行器系统。一体化的关节执行器是最核心的硬件模块,它集成了电机、减速器、驱动器、编码器等关键部件,负责驱动机器人的每一个关节。考虑到人形机器人通常拥有20个以上自由度,单台机器人对关节执行器的需求量极大。末端执行器,是人形机器人与环境交互的直接工具,直接影响机器人的作业能力,其中最复杂也最通用的五指灵巧手需要多个微型关节执行器和传感器。由于单台人形机器人对上述感知和运动核心零部件的需求数量庞大(例如,关节执行器数十个,各类传感器数十甚至上百个),人形机器人市场的快速发展毫无疑问将撬动这些零部件的爆发式增长。
在感知和运动层面之外,人形机器人的另一个重要的核心硬件当属为了感知、决策和运动提供能量的电池系统。由于多关节系统的耗能以及有限的本体空间,电池系统的能量密度是人形机器人续航能力是重要前提,而快充和换电则是在能量密度受限的情况下能有效实现机器人不间断运行的重要技术应用,与此同时,通过对电池系统的实时安全监测和智能化的续航管理将有益于降低人形机器人的失效成本。
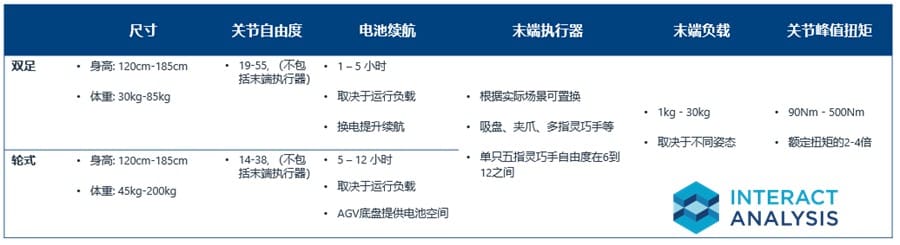
表1:人形机器人的构型和核心参数范围
关节执行器——人形机器人的“力量与灵活之源”
在人形机器人的众多核心零部件中,关节执行器无疑扮演着至关重要的角色,其重要性主要体现在以下几个方面:
首先,所需数量大,BOM成本占比高。如前所述,一台全尺寸人形机器人通常具备数十个自由度,每一个自由度的实现都离不开一个关节执行器。例如,特斯拉的Optimus人形机器人拥有超过28个旋转和线性执行器,而其灵巧手则可能包含更多微型执行器。这种庞大的单机需求量,使得关节执行器成为人形机器人硬件成本构成中的大头。根据IA发布的全球人形机器人市场报告,关节执行器在一台高配置的人形机器人(含五指灵巧手、高算力芯片等)整体BOM成本中的占比通常也会超过30%,而在一些不含灵巧手不含高算力芯片的基础版本中会占到50%以上,这意味着关节执行器的成本控制和供应链稳定性,直接影响到人形机器人的最终售价和量产可行性。
其次, 关节是机器人运动的核心部件,对机器人运行过程中的稳定性和安全性产生重要影响。关节执行器的性能直接决定了人形机器人运动的流畅度、精准度和动态响应能力。高性能关节模组需要确保机器人在复杂运动中的稳定性,防止抖动、失稳甚至摔倒。关节的可靠性和安全性至关重要,任何一个关节的失效都可能导致机器人整体功能受损甚至引发安全事故。
与此同时,不同关节位置对尺寸和性能要求各异。人形机器人的不同关节,如肩、肘、腕、髋、膝、踝等,其运动范围、负载能力、精度要求、响应速度等均不相同。例如,负责支撑身体重量和大幅度运动的腿部关节,需要输出更大的扭矩和具备更高的刚性;而负责精细操作的手臂和腕部关节,则对轻量化、紧凑性和定位精度有更高要求。这种差异化的需求,使得关节执行器的设计和选型极具挑战性,需要针对不同部位进行定制化或系列化开发,在没有规模化需求的情况下,研发和制造成本高昂。
人形机器人关节执行器的技术要求和市场趋势
虽然在结构上,人形机器人的关节模组与工业协作机器人虽说有相似之处,但依然存在不少差异化需求,从许多层面对性能提出了更高的要求。
其中,轻量化与小型化是首要目标,轻量化的关节有助于降低系统的重量,提升运动灵活性并降低关节能耗,提升续航能力,而基于高度通用性产生的拟人化需求让人形机器人关节模组需要类人的尺寸。因此,人形机器人关节需要高度集成式的设计,将电机、减速器、驱动器、编码器乃至传感器等部件紧密集成在一体化关节模组中。低能耗与低温升同样关键,尤其对于关节数量众多而电池空间又有限的人形机器人,关节模组的能源利用和散热能力直接影响其续航能力和关节性能。另外,人形机器人对关节的动态响应速度、爆发力、柔性控制以及在复杂非结构化环境下的适应性要求更高。这也对关节的动态性能和控制算法提出了更高挑战。
由于这些差异化的技术要求,导致在发展的早期阶段,市场上相对缺乏完全适配人形机器人的标准化、低成本关节产品。许多人形机器人公司,特别是领先的头部企业,为了满足自身产品的特定需求并控制核心技术,往往选择投入自行设计,甚至自行制造关节执行器。
然而,过去12个月以来,随着人形机器人产业热潮的兴起,越来越多的机器人零部件制造商开始积极布局,致力于打造高性能、高性价比的一体化关节产品,力图抓住机遇,成为人形机器人产业链中的Tier 1核心供应商。这一趋势有望在未来几年内缓解关节模组产能紧张和成本高昂的问题,推动人形机器人产业的加速发展。
硬件技术路线的多元探索与应用场景的早期孵化
当前,人形机器人的硬件技术路线呈现出显著的多元化特征,各种创新性方案不断涌现,整个行业仍处于快速的技术迭代周期中。这背后深层的原因在于,人形机器人的下游市场及其规模化应用场景尚处于早期孵化阶段。与已经形成成熟应用模式的工业机器人不同,人形机器人作为一种通用型自动化平台的潜力巨大,但其能够在哪些具体场景中创造显著的生产性价值,以及如何实现高效、可靠的规模化部署,仍有待进一步探索和验证。
这种情况某种程度也造成了上游硬件技术路线选择的不确定性。例如,在关节设计上,虽说在上肢关节上,多数厂商已经达成了使用谐波模组的共识,但市场上依然存在一些不同的技术方案,比如摆线模组或是极低减速比的准直驱方案,而对于下肢模组,谐波、行星和RV模组都有相应的厂商正在布局。在感知层面,虽然多传感器融合已是共识,但具体采用何种传感器组合、如何优化融合算法以适应不同环境和任务,仍在持续演进。
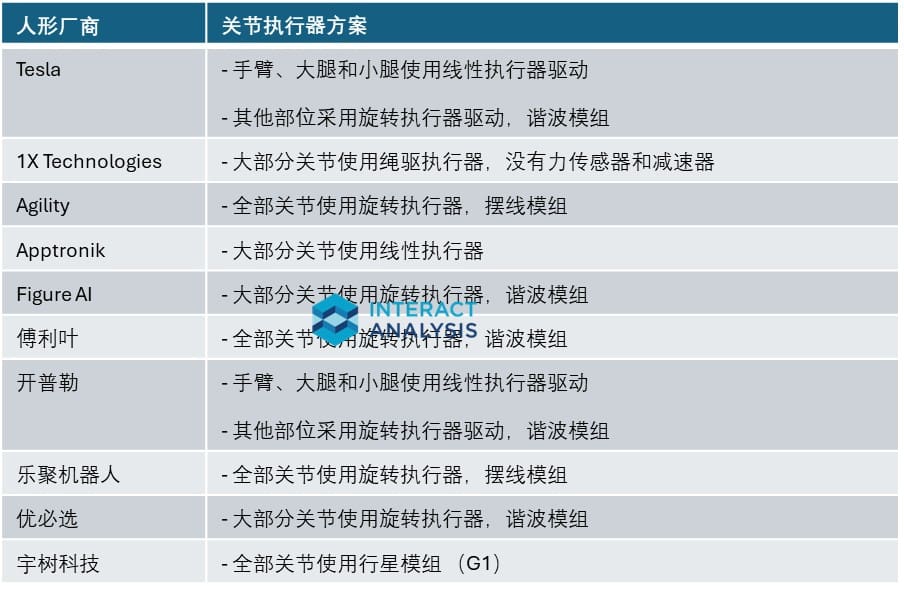
表2:部分人形机器人制造商的关节模组技术方案
硬件技术路线的多元化和快速迭代,一方面反映了行业的创新活力,另一方面也意味着产业链上下游都需要为多种可能性做好准备,并投入更多资源进行研发和测试。最终哪种或哪些技术路线能够成为主流,很大程度上取决于未来能够成功解锁并实现规模化应用的具体场景。例如,如果人形机器人在家庭服务场景率先取得突破,那么对硬件的安全性、低噪音、低成本和人机交互友好性要求会更高;如果是在工业制造或物流搬运等场景得到广泛应用,则可能更看重负载能力、作业效率和长期可靠性。因此,硬件的发展路线选择,迫切需要更多成功的应用案例来进行验证和迭代优化,从而逐步收敛并形成行业标准。这一过程也将伴随着部分技术路线的淘汰和优势方案的胜出,推动整个产业链走向成熟。
探讨更多关于人形机器人市场的动态,请直接联系分析师Marco Wang
或请下载《人形机器人》报告样本
最新机器人&仓储自动化洞察