机器人 & 仓储自动化
2025-12-16
人形机器人关节减速器技术路线:如何满足 “既要,又要”?

Marco Wang
Marco负责支持Interact Analysis在商用车领域的研究。在加入Interact Analysis之前,他在德国完成研究生课程后在一家投资银行工作,主要负责汽车行业跨境并购项目的行业研究。他在氢动力汽车市场拥有丰富的研究经验。
人形机器人的关节执行器作为 “运动关节的心脏”,其技术选型始终围绕着一组核心矛盾展开:既要高精度又要抗冲击、既要小尺寸又要大扭矩、既要低成本又要高可靠性、既要柔性控制又要耐用性。
这种 “既要又要” 的多元诉求,使得关节执行器技术(尤其是减速器维度)呈现出显著的多样性特征 —— 现阶段不同技术路径并行共存且持续迭代,行业内的技术尝试与路线争论从未停歇,市场尚未形成主流技术共识。核心原因在于,人形机器人的规模化商业化应用场景仍未明确,没有统一的性能指标标尺来定义 “最优解”,各类技术均在特定需求维度占据优势,同时存在难以规避的短板。
五大技术路径
各有优劣,适配不同场景
(一)谐波减速器
上肢关节的 “精度标杆”
谐波减速器是当前多数人形机器人厂商在上肢关节的首选方案。其核心优势在于极致的精度控制、紧凑的尺寸设计和轻量化特性,且该技术已在协作机器人领域经过长期的技术验证与规模化应用,成熟度较高,能够很好地满足上肢关节对动作精准度、空间适配性的核心需求。但受限于柔轮与钢轮的结构设计,谐波减速器的抗冲击性能较弱,在需要承受瞬时重载或剧烈运动的场景中易出现疲劳损耗,这也使其在下肢关节的应用中受到限制。
(二)行星减速器
成本与抗冲击的 “平衡之选”
行星减速器的核心竞争力在于抗冲击性优于谐波,且同等规格下制造成本相对较低,力矩透明度和反驱性能也更优。但其技术痛点在于需要在尺寸与扭矩之间做出妥协:对于无严格负载要求、追求动态性能的小型人形机器人(如 宇树 的 G1),行星减速器能够以较小体积实现基础动力传输;而对于大型双足人形机器人,由于下肢关节空间更充裕、对精度要求相对宽松,许多企业选择行星减速器驱动下肢关节,而一些强调柔性力控和反驱性的人形机器人厂商则会基于行星减速器打造极低减速比的准直驱(QDD)关节。
(三)摆线减速器
下肢关节的 “潜力股”
摆线减速器在技术特性上呈现出 “中间态优势”:抗冲击性与反驱性能优于谐波方案,精度与尺寸控制则优于行星减速器,理论上是下肢关节的理想选择 —— 既能够承受双足行走时的地面冲击,又能满足关节动作的精准控制需求。但该技术的短板在于成本较高,导致全球范围内大面积采用摆线关节的人形机器人公司不到 10 家。值得关注的是,今年刚成立的中国企业 动易科技,是国内首个大量使用摆线关节的厂商;另外,像 美国 的 Agility、Foundation Robotics、韩国 的 ROBOTIS 等则是海外采用该技术路线的人形机器人公司代表。
(四)绳驱传动
拟人化的 “柔性探索”
绳驱关节以绳子作为传动介质,类比人类的肌腱结构,是典型的少数派技术路线。其核心优势在于极致的拟人化运动表现与柔性控制能力,能够模拟人类关节的自然发力轨迹,在人机交互场景中具备更高的安全性。但该技术对绳子材料的强度、耐磨性、抗疲劳性提出了极高要求,耐用性不足成为制约其规模化应用的关键瓶颈。目前采用该技术的厂商包括 1X、中国 的 星尘智能、韩国 的 Naver lab、ROBROS 等,均聚焦于高拟人化需求的产品研发。
(五)线性关节(行星滚柱丝杠传动)
负载与能耗的 “高端方案”
线性关节主要以行星滚柱丝杠为核心传动装置,最大优势在于超强负载能力与低能耗表现,能够满足人形机器人部分关节(如腰部、腿部大关节)的重载驱动需求。但行星滚柱丝杠属于高精密机械组件,能够提供可靠产品的制造商数量有限,而且成本高昂,另外,采用线性关节会对控制算法提出了更高要求 —— 需要精准协调丝杠的线性运动与关节的转动需求,算法难度更大。
(在此前的文章为什么小鹏人形机器人的小腿和宇树的不一样?中我们做过更多关于线性关节的探讨,这里不再赘述)
全球 20 + 人形机器人制造商
关节执行器技术梳理
为清晰呈现关节执行器的技术选型现状,我们梳理了全球范围内 20 余家主流人形机器人制造商的关节技术路线:
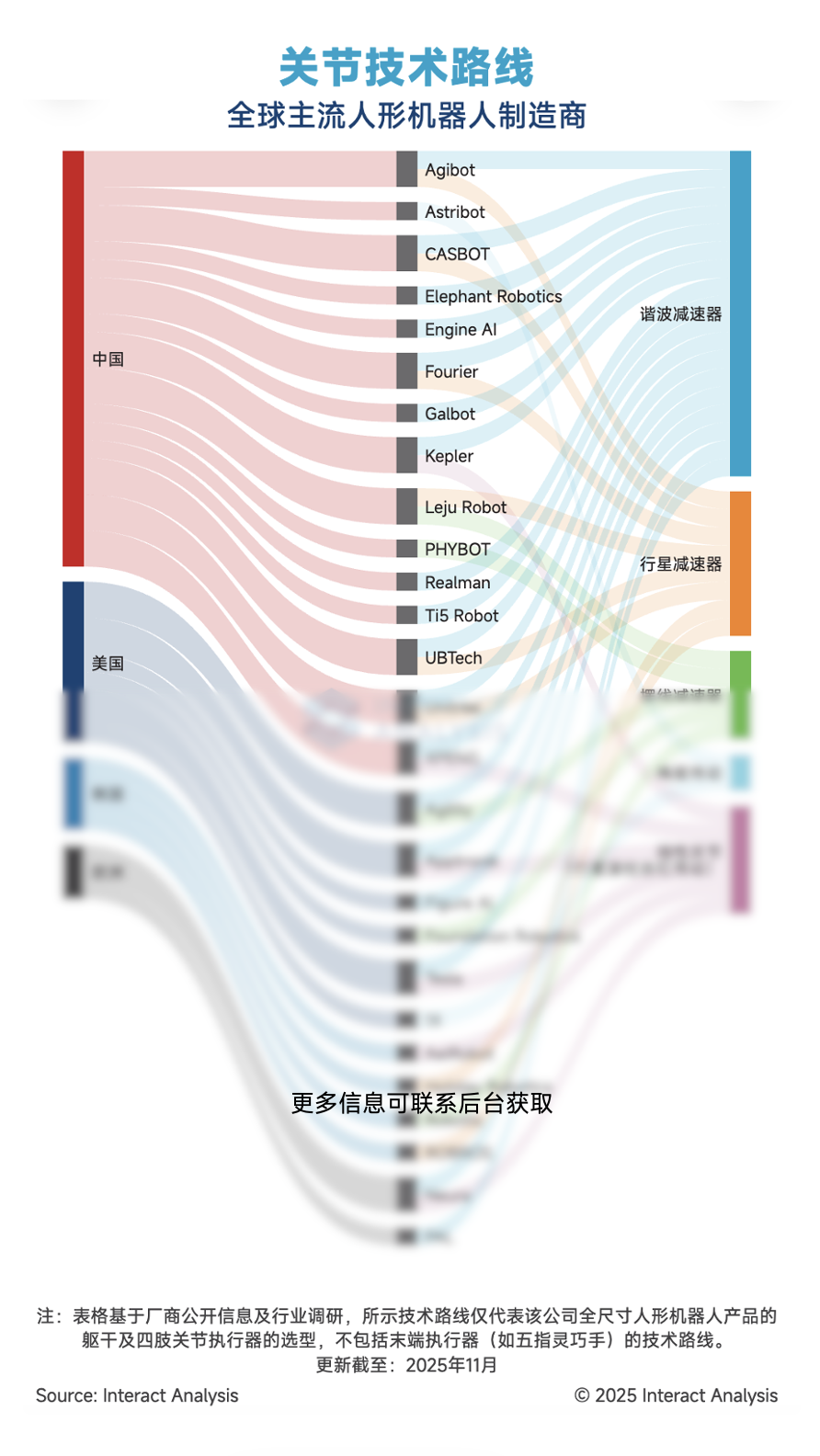
正如前文所述,谐波、行星、摆线、绳驱、线性关节五大技术路径均存在明确的优势与短板,没有一种技术能够全面满足 “既要又要” 的所有诉求,这也导致了目前大部分制造商在关节执行器的时候通常采用深度定制化开发以求满足人形机器人的性能需求,而且,如同上图所示,产品不会停留在单一技术框架,哪怕是同一型号的机器人也会在不同的关节采用不同的方案,这种 “按需定制、优势互补” 的研发思路,已经成为化解 “既要又要” 矛盾的关键方向。
小结
现阶段,依然很难就哪种技术路线能成为主流方案得出共识,每个制造商也在积极根据实际场景示范应用的反馈进行技术迭代。关节执行器技术的最终走向,本质上取决于人形机器人能否实现规模化落地的应用场景,不同场景对机器人的形态(小型轻量化 / 大型重载化)、动作需求(高精度操作 / 强动态行走)、使用环境(室内人机协作 / 室外复杂地形)的要求存在显著差异,进而对关节的精度、抗冲击性、尺寸、成本、耐用性等指标形成不同的优先级排序。在规模化商业化落地之前,“既要又要” 的多元诉求仍将驱动关节执行器技术保持多样性迭代。而最终能够脱颖而出的技术路线,必然是最能适配主流应用场景核心需求、实现性能与成本最优平衡的方案。
最新机器人&仓储自动化洞察